:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/03/1741781917/1b34a9c5909e844be4d7a743c0dffa2c-t.jpg)
:format(webp):quality(90)/https://www.descopera.ro/wp-content/uploads/2013/07/11057951/2-nasa-space-station-telerobotics-test-1.jpg)
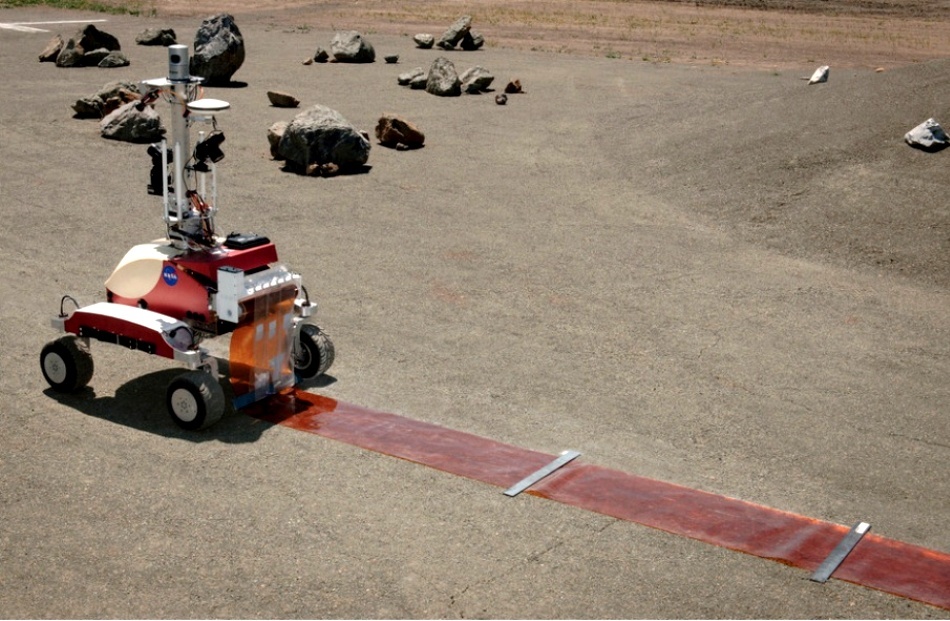
Astronautul NASA Chris Cassidy, inginer de zboruri spaţiale, a reuşit să controleze de la distanţă, de pe SSI, un rover – un vehicul robotic – aflat la Centrul de Cercetări Ames din California.
Robotul a fost telecomandat pentru a simula desfăşurarea unei antene din folie de poliimidă, într-un poligon special construit.
Aflat pe SSI, Cassidy a recepţionat, în timp real, date de telemetrie şi imagini video ale roverului şi a monitorizat răspunsurile acestuia la comenzi.
Această primă încercare va fi urmată de alte teste de acelaşi tip, pentru a încheia desfăşurarea virtuală a antenei, a inspecta rezultatul procesului şi a studia interacţiunea om-robot.
Testele, au de asemenea,rolul de a studia modul în care comunicaţiile pe distanţe lungi influenţează aptitudinile unui astronaut de a prelua controlul unui robot, în situaţia în care acesta ar întâmpina dificultăţi sau ar ajunge în imposibilitatea de a se deplasa singur.
Testul reprezintă prima simulare de înaltă fidelitate a unei misiuni spaţiale om-robot „la punct fix” şi a cuprins o serie de premiere tehnologice în domeniu.
Este un pas important spre realizarea uneia dintre misiunile avute în vedere de NASa în viitor: instalarea unei antene de radiotelescop din folie specială, pentru recepţionarea de unde radio de joasă frecvenţă, pe faţa îndepărtată a Lunii. Asemenea radiotelescoape din folie de poliimidă ar putea recepta radiaţia de joasă frecvenţă care există ca vestigiu al Big Bang-ului şi care poate da informaţii despre Universul foarte timpuriu. Faţa îndepărtată a Lunii este un loc „liniştit” din punct de vedere al cantităţii şi varietăţii de unde radio care trec pe acolo, ceea ce ar permite observaţii astronomice de mare acurateţe ale primelor stele şi galaxii formate la doar 100 de milioane de ani după Big Bang.
Sursa: SPACE.com / Foto: NASA
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1589795485/482d89f0e6b7bef8c3d7309e7e2fe81a-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1589795423/da273d8c805d2bfd3925bbb11c016a35-t.png)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1687506106/eebe77d018d79645291c746f25bfc159-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1619101788/9e1426632e4daa0f9b7adb38d43c2e76-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1604659743/4788d9d6a0a6fccd5fd374f15d5352ef-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/03/1741781930/e3a9188541ebe39347a96ad62c619a30-t.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/03/razboiului-ucraina-shutter_descopera-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/femeie-muta-shutter_Descopera-1024x687.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/americani-in-siria-shutter_Descopera-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/roboti-semimaraton-profi_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/Barcelona-Open-down-profi_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/masini-tesla-vanzari-shutter_Descopera-1024x679.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1589795438/a312bdee7e23fe375361457b3aca9355-t.png)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1623146229/0a414ee31edc558ff9bd2aad03090342-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1589795452/b6964d53d72ab99e98cd0d0bb3e1d0cc-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2025/04/1593777592/843bef87b47aa53d0b271d9025bc7749-t.png)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/picturi-murale-vilamuseu_Descopera-1024x462.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/Terraformarea-planetei-Marte-nu-este-imposibila_shutterstock_descopera-4-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/roci-manta-pamant-shutter_descopera-1024x643.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/castelul-parasit-oeaw_descopera-1024x767.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/alergii-polen-shutter_descopera-1024x768.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/papa-francisc-fapte-shutter_Descopera-5-1024x672.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/Baietii-performeaza-mai-putin-la-liceu_shutterstock_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/Cum-stiu-pasarile-incotro-sa-zboare_shutterstock_Descopera-10-1024x685.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/galaxie-spirala-NOIRLab_descopera-1024x1024.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/03/razboiului-ucraina-shutter_descopera-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/femeie-muta-shutter_Descopera-1024x687.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2024/04/intemeierea-romei-shutter_descopera-1024x561.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/americani-in-siria-shutter_Descopera-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/roboti-semimaraton-profi_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/Barcelona-Open-down-profi_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/masini-tesla-vanzari-shutter_Descopera-1024x679.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/biserica-sfintii-ierarhi-shutter_Descopera-2-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/Anestezia-generala-reduce-unicitatea-creierului_shutterstock_Descopera-5-1024x683.jpg)